Hospital layout design renovation as a Quadratic Assignment Problem with geodesic distances
Journal of Building Engineering, Volume 44, Dec 2021
Authors: Cemre Cubukcuoglu, Pirouz Nourian, M. Fatih Tasgetiren, I. Sevil Sariyildiz, Shervin Azadi
Abstract:
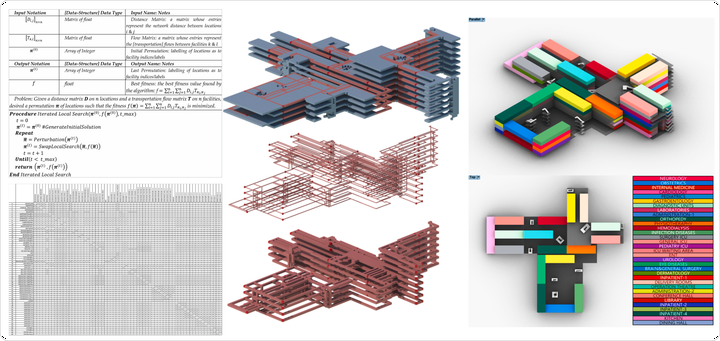
Hospital facilities are known as functionally complex buildings. There are usually configurational problems that lead to inefficient transportation processes for patients, medical staff, and/or logistics of materials. The Quadratic Assignment Problem (QAP) is a well-known problem in the field of Operations Research from the category of the facility’s location/allocation problems. However, it has rarely been utilized in architectural design practice. This paper presents a formulation of such logistics issues as a QAP for space planning processes aimed at renovation of existing hospitals, a heuristic QAP solver developed in a CAD environment, and its implementation as a computational design tool designed to be used by architects. The tool is implemented in C# for Grasshopper (GH), a plugin of Rhinoceros CAD software. This tool minimizes the internal transportation processes between interrelated facilities where each facility is assigned to a location in an existing building. In our model, the problem of assignment is relaxed in that a single facility may be allowed to be allocated within multiple voxel locations, thus alleviating the complexity of the unequal area assignment problem. The QAP formulation takes into account both the flows between facilities and distances between locations. The distance matrix is obtained from the spatial network of the building by using graph traversal techniques. The developed tool also calculates spatial geodesic distances (walkable, easiest, and/or shortest paths for pedestrians) inside the building. The QAP is solved by a heuristic optimization algorithm, called Iterated Local Search. Using one exemplary real test case, we demonstrate the potential of this method in the context of hospital layout design/re-design tasks in 3D. Finally, we discuss the results and possible further developments concerning a generic computational space planning framework.