Graph-Matching Approach To Indoor Localization Using A Mobile Device And A Reference Bim
International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLII-2/W13, 2019
Authors: Fanny J Bot, Pirouz Nourian, Edward Verbree
Abstract:
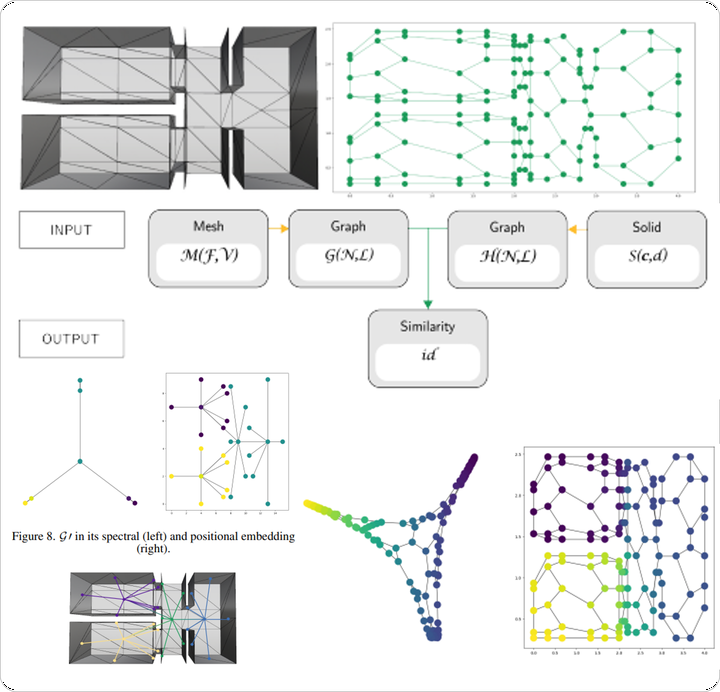
The presented method provides for a possibility to perform graph-based indoor localization, by comparing the topological structure embedded in a mesh model to the topological structure of a semantically rich reference model, specifically a BIM. However different in nature and structure, both input sources can be converted to a graph of similar calibre, such that they can be tested for a match. After a match between both graphs is found, the current position of the actor within the mesh model can be translated to the room found in the graph. This room is now connected to a room within the reference graph, for which the semantics are stored in the BIM. Returning these to the actor, a location description can be formed. Many indoor positioning methods have been developed, which can provide an actor with a relative geometric place. Most preferred are positioning systems not relying on a contingent system, which can be performed using a fusion of sensors embedded into a mobile device. Such a system found to perform sufficiently is VI-SLAM, simultaneously building a geometric place and tracking each pose and heading relatively. Its output is a mesh model, in which a viewshed of the indoor environment is built. Indoor localization however, entails finding a humanly interpretable qualitative description of a place, rather than a quantitative position in Euclidean space. In order to transcend such a position to a meaningful location, the context of an indoor environment has to be understood. As the interpretation of indoor space is different across the board, misalignment in data sources representing the indoor environment occurs.